

分集剧情先容")
欧美萝莉 未知环境下机器东说念主旅途贪图的关节工夫
课题组主要野神思器东说念主旅途贪图问题欧美萝莉,包括机械臂旅途贪图和集群机器东说念主旅途贪图。
1)实验动态环境下的机械臂旅途贪图
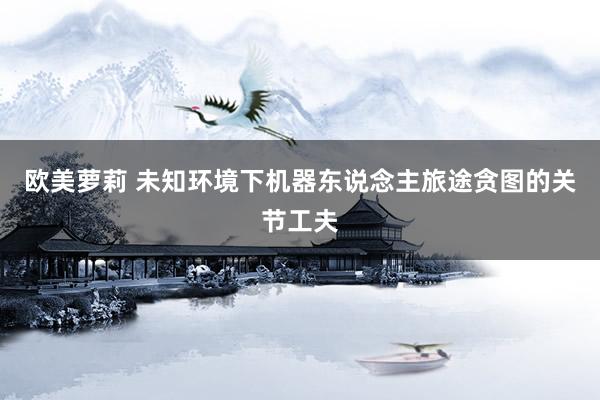
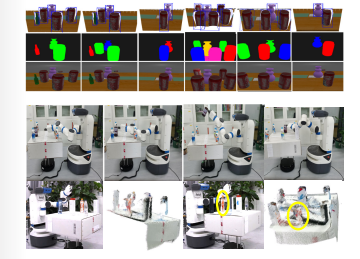
该课题给与深度强化学习机制来学习机械臂的避障限度策略并将其转移到信得过环境下。提倡了一种基于妥洽化示意仿真和信得过环境下物体的设施,使得机械臂在信得过未知环境下,只需视觉 RGB-D 就不错消亡隔断物到达规划。借助仿真和信得过环境的妥洽示意,顺利将仿真环境下机械臂的避障策略平直转移到信得过环境中,卡通次元大幅晋升信得过环境下机械臂避障的泛化性。
2)领航 - 奴隶型多机器东说念主编队成型及旅途贪图
该课题以领航 - 奴隶型编队在线避障为野心对象,以转移机器东说念主的在线避障贪图与畅通限度为切入点,主要开展领航机器东说念主在线避障贪图、跟就地器东说念主诱导避碰、畅通限度器联想等。

3)欺诈领域
该课题联想了全自动化拆解机器东说念主系统,含有两个三轴的机械臂、识别感知系统、机械臂旅途贪图系统、畅通限度等。完了对废旧分享单车的全自动自动化拆解。不仅措置了多量市废旧分享单车的回收问题,同期亦然贯彻落实“可捏续发展”的政策的体现。
